Overview
An avionics stack engineered the way flight hardware should be.
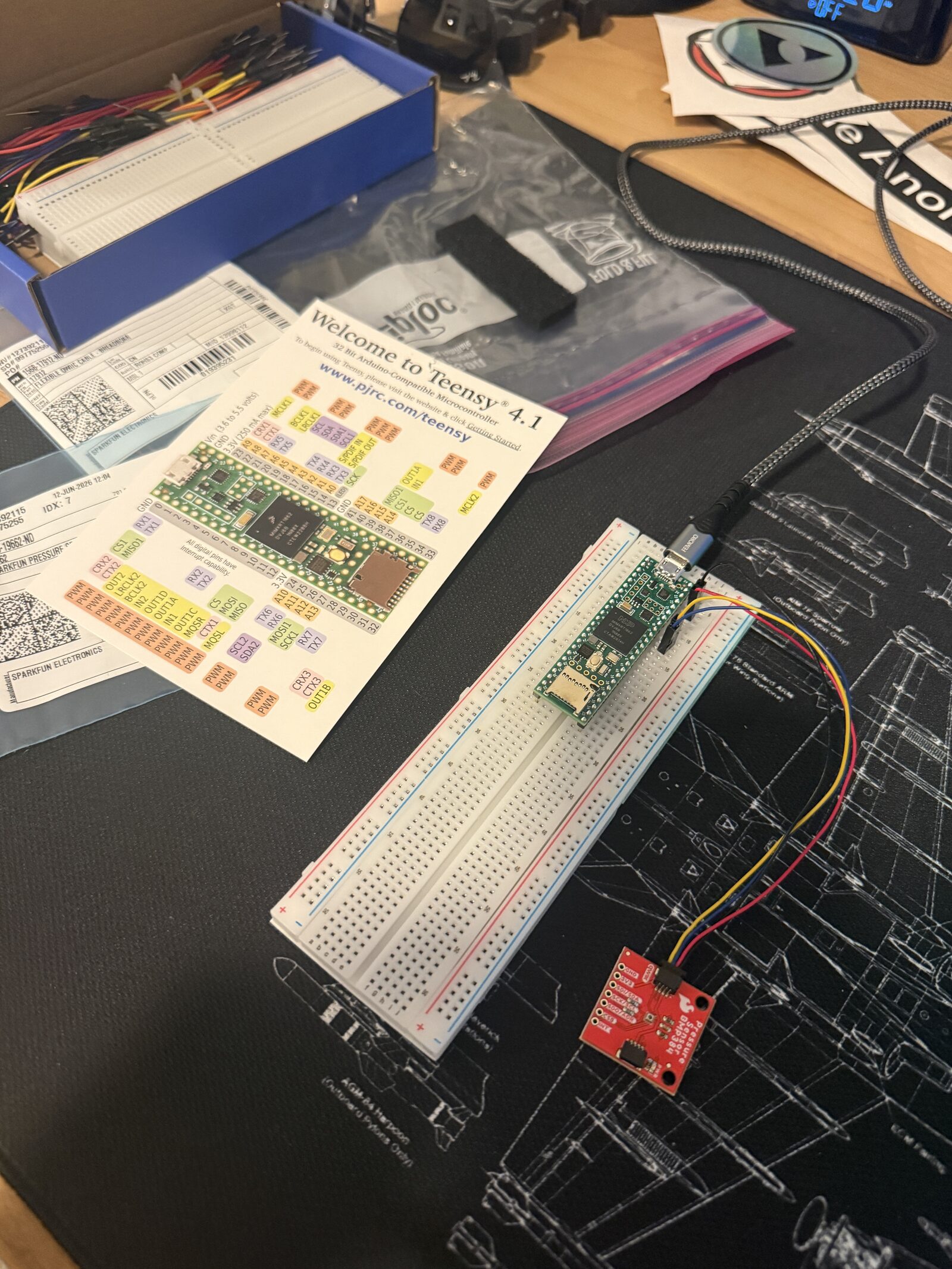
Daedalus is a personal R&D project to design, build, and qualify a rocket flight computer end-to-end — the printed circuit, the sensor suite, the embedded flight software, and the test infrastructure that proves it works. The goal isn't just a board that boots; it's a system whose behavior is verified in simulation and on the bench before any real flight.
Philosophy
Test-driven flight code
Every guidance, navigation & control path is exercised in a simulated environment first, so the firmware that flies is the firmware that's already been proven against thousands of synthetic trajectories.
Scope
Full-stack, board to launch
Sensor drivers, state estimation, flight state machine, data logging, and a ground-test harness — all written from scratch in C++ on bare-metal Teensy, with no flight-controller framework underneath.